Wolf-Hase: Räuber-Beute-Modell
System zweier gekoppelter ODES. Siehe auch die Lotka-Volterra-Gleichungen.
Contents
Parameter der Evolutionsgleichungen festlegen
clear; clc; clf; close all alpha = 8.5; % Todesrate der Woelfe beta = 10; % Vermehrungsrate der Hasen gamma = 0.01; % Nachwuchsrate der Woelfe (dank Beute=Hasen) delta = 0.07; % Todesrate der Hasen (durch die Jaeger=Woelfe) time_a = 0; % Startzeit time_b = 2; % Endzeit tau = 1/1000; % Schrittweite in der Zeit t = time_a:tau:time_b; nt = length(t); % Anzahl der Zeitschritte
Anfangspopulationen
wolf(1) = 100; hase(1) = 1000;
Zeititeration.
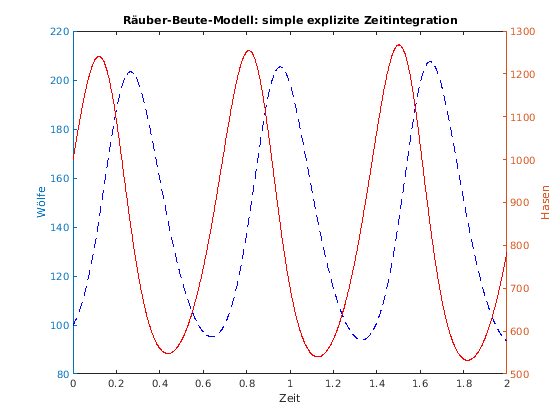
Exlizites Schema der Zeitintegration. Erfordert sehr kleine Zeitschrittweite für numerische Stabilität.
wolf(nt) = 0; % Stellt Speicher fuer alle benoetigetn Vektorelemente bereit. hase(nt) = 0; for m = 2:nt wolf(m) = wolf(m-1) -tau*alpha*wolf(m-1) + tau*gamma*wolf(m-1)*hase(m-1); hase(m) = hase(m-1) +tau*beta *hase(m-1) - tau*delta*wolf(m-1)*hase(m-1); end
Ergebnisse anzeigen
% alt: mit plotyy % [AX,H1,H2] = plotyy(t,wolf,t,hase); % title('Räuber-Beute-Modell'); % xlabel('Zeit'); % set(H1,'LineStyle','--') % set(H2,'Color','r') % set(get(AX(1),'Ylabel'),'String','Wölfe') % set(get(AX(2),'Ylabel'),'String','Hasen') % set(get(AX(2),'Ylabel'),'Color','r') % neu: mit yyaxis yyaxis left plot(t,wolf,'--b') ylabel('Wölfe') hold on yyaxis right plot(t,hase,'-r') ylabel('Hasen') title('Räuber-Beute-Modell: simple explizite Zeitintegration'); xlabel('Zeit'); saveas(gcf,'wolf_hase.jpg'); % Speicher die aktuelle Grafik als jpg-File hold off % publish('wolf_hase.m')
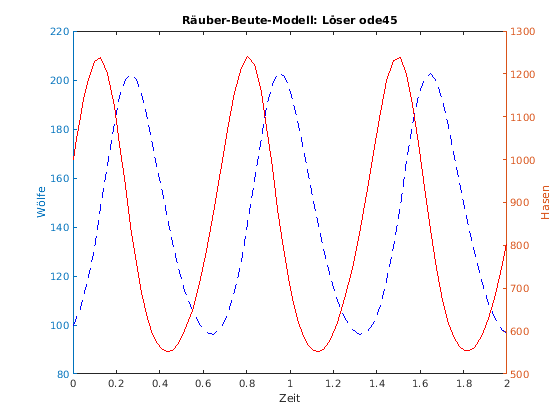
Solve as system of ODEs
figure tspan = [time_a time_b]; y0 = [wolf(1),hase(1)]; [t,yode] = ode45(@(t,y) odefcn(t,y,alpha,beta,gamma,delta), tspan, y0);
Visualisierung
plot(t,yode) neu: mit yyaxis
yyaxis left plot(t,yode(:,1),'--b') ylabel('Wölfe') hold on yyaxis right plot(t,yode(:,2),'-r') ylabel('Hasen') title('Räuber-Beute-Modell: Löser ode45'); xlabel('Zeit');
Beschreibung des ODE-Systems

function dy = odefcn(t,y,alpha,beta,gamma,delta) dy = zeros(2,1); dy(1) = -alpha*y(1) + gamma*y(1)*y(2); dy(2) = beta *y(2) - delta*y(1)*y(2); end